
Das ist der Eachine Tyro99 Bausatz der nicht mal 80€ kostet. Es sind viele Kleinteile, aber leicht zum Zusammenbauen. Nach ca. 6 Stunden Arbeit ist der Tyro99 flugfertig und wiegt ca. 330 Gramm.
Tyro99 fliegt sehr gut, aber die CMOS Kamera könnte besser sein.
Holt euch jetzt den Tyro99 im Angebot für 69€ Coupon: ET79 bei Banggood
Video 1 – Eachine Tyro99 DIY FPV Racer Drohne – Zusammenbau
Video 2 – Eachine Tyro99 DIY FPV Racer Drohne – Flugtest
















Ich habe bei dem Tyro99 die sehr gute Infinity Akkus V2 mit 1500mAh 100C verwendet.

AHTECH Infinity 1500mah 100C 14.8V RS FORCE EDITION
Sehr gute Akku der garantiert 65 Amper kontinuirlich abliefert und nur 171 Gramm leicht ist. 100A Kurzbelastung möglich.
21,68€ – Banggood Coupon: rchobbies8
Aber es reichen auch die günstigere Tattu Akkus mit 1300mAh und 75C

Tattu LiPo 1300mAh 75C 4S XT60 Akku
Ein guter Akku für die meisten 5 Zoll FPV Racer Drohnen. 156 Gramm leicht.
21€ – Amazon
19€ – Voelkner
oder der neuer Tattu Funfly 1300mAh 14.8V 100C
Banggood
oder auch ok Turnigy Nano-Tech Plus 1300mAh 4S 70C
Hobbyking EU Lager
Tipps
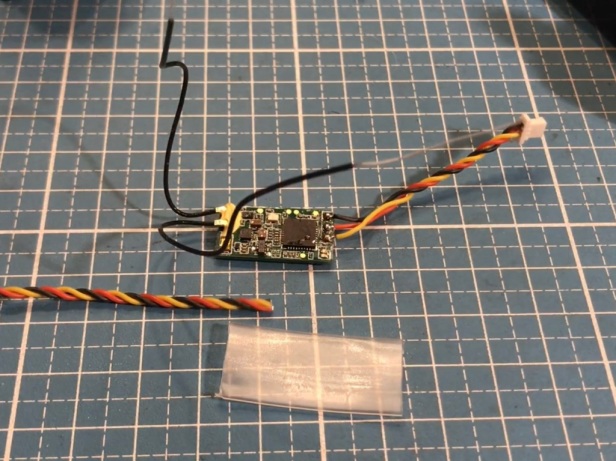
1. An meinen XM Plus Empfänger habe ich einfach das Empfänger Kabel gekürzt und an XM Plus angelötet.

2. Wichtig – am Flugcontroller Board muss die SBUS Brücke zusammen gelötet werden damit SBUS an der Empfänger Buchse verfügbar ist. Sonst habt Ihr an dem gelben Kabel nur PPM Signal. Die Brücke befindet sich rechts neben der Empfänger Buchse, da wo links SBUS steht zusammen löten. Für iBUS, DSMX wird die rechte Brücke zusammen gelötet.


3. Der XM Plus Empfänger wird unter der Carbon Deckel gelegt. Oben kommt der Video Sender drauf.

4. Achte bei dem XM Plus Empfänger dass der Bindungsknopf vom aussen erreichbar ist wie hier im Bild in der kleinen Öffnung von der Carbon Deckel.
5. Der MMCX Antenne Stecker sollte vor der Montage in die Video MMCX Buchse gesteckt werden. (geht etwas schwer)
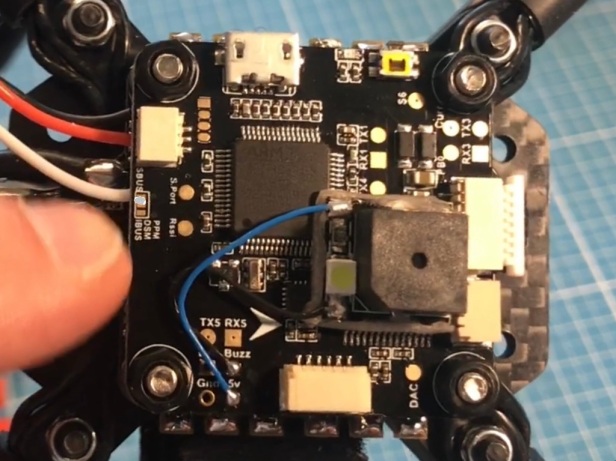
6. Der Buzzer wird wie im Bild angeschlossen. Das blaue Kabel an 5 Volt plus und das schwarze an BUZZ-

7. Ein FrSky R-XSR Empfänger wird wie im Bild mit dem schwarzen, roten und grünen Kabel verwendet. Die zwei Kabel mit gelb und weiss habe ich entfernt.
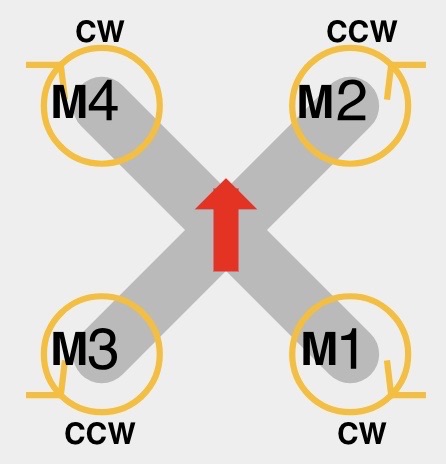
Drehrichtung der Motoren. Vordere Motoren drehen zu der FPV Kamera, die hinteren Motoren zum Heck.
 Flytower Screw Set for Eachine Tyro99 210mm DIY Version RC Drone Spare Parts
Flytower Screw Set for Eachine Tyro99 210mm DIY Version RC Drone Spare Parts
Hier das Upgrade für Tyro99 die Soft Mount FC Schrauben für bessere stabilisierung vom dem empfindlichen 32kHz ICM20602 Gyro.
3,15€ – Banggood Coupon: TTxBG10
 URUAV Hummingbird 145 145mm Wheelbase 4mm Arm Carbon Fiber Frame Kit for RC Drone FPV Racing
URUAV Hummingbird 145 145mm Wheelbase 4mm Arm Carbon Fiber Frame Kit for RC Drone FPV Racing
Leichtes Frame für ein 3 Zoll FPV Racer. Passt sehr gut als Ersatz Frame für TS130. Bodenschrauben sind leider sehr kurz.
13,13€ – Banggood Promo
Video 3 – Eachine Wizard TS130 URUAV Hummingbird 145
Meine Konfiguration
Auf dem Tyro ist Betaflight 3.5.5 mit folgenden Änderungen (diff):
# diff 2019-01-21 # Betaflight / MATEKF405 (MKF4) 3.5.5 Jan 15 2019 name Tyro99 feature -SOFTSERIAL feature LED_STRIP feature AIRMODE beacon RX_LOST beacon RX_SET aux 0 0 0 1700 2100 0 0 aux 1 1 1 900 1225 0 0 aux 2 2 1 1300 1700 0 0 aux 3 13 2 1700 2100 0 0 aux 4 35 2 1700 2100 0 0 aux 5 47 2 1300 1700 0 0 set acc_trim_roll = 2 set mag_hardware = NONE set baro_hardware = NONE set rc_smoothing_type = FILTER set fpv_mix_degrees = 30 set serialrx_provider = SBUS set motor_pwm_protocol = DSHOT600 set beeper_dshot_beacon_tone = 5 set small_angle = 65 set deadband = 2 set yaw_deadband = 2 set pid_process_denom = 1 set osd_warn_core_temp = OFF set osd_cap_alarm = 350 set osd_vbat_pos = 2433 set osd_rssi_pos = 40 set osd_tim_1_pos = 2422 set osd_tim_2_pos = 33 set osd_flymode_pos = 333 set osd_throttle_pos = 2455 set osd_vtx_channel_pos = 377 set osd_ah_pos = 200 set osd_current_pos = 456 set osd_mah_drawn_pos = 463 set osd_craft_name_pos = 2401 set osd_gps_speed_pos = 218 set osd_gps_lon_pos = 82 set osd_gps_lat_pos = 65 set osd_gps_sats_pos = 51 set osd_home_dir_pos = 302 set osd_home_dist_pos = 303 set osd_compass_bar_pos = 266 set osd_altitude_pos = 247 set osd_pid_roll_pos = 423 set osd_pid_pitch_pos = 455 set osd_pid_yaw_pos = 487 set osd_debug_pos = 1 set osd_power_pos = 321 set osd_pidrate_profile_pos = 345 set osd_warnings_pos = 425 set osd_avg_cell_voltage_pos = 417 set osd_pit_ang_pos = 257 set osd_rol_ang_pos = 289 set osd_battery_usage_pos = 424 set osd_disarmed_pos = 138 set osd_nheading_pos = 311 set osd_nvario_pos = 279 set osd_esc_tmp_pos = 82 set osd_esc_rpm_pos = 83 set osd_stat_tim_1 = ON set osd_stat_max_spd = OFF set osd_stat_min_rssi = OFF set osd_stat_bbox = OFF set osd_stat_bb_no = OFF profile 0 set dterm_notch_cutoff = 0 set anti_gravity_threshold = 300 set feedforward_transition = 25 set iterm_rotation = OFF set iterm_relax = RPY set throttle_boost = 0 set p_pitch = 72 set i_pitch = 60 set d_pitch = 37 set f_pitch = 0 set p_roll = 77 set i_roll = 60 set d_roll = 35 set f_roll = 0 set p_yaw = 90 set f_yaw = 0 set p_level = 45 rateprofile 0 set thr_expo = 25 set roll_rc_rate = 90 set pitch_rc_rate = 90 set yaw_rc_rate = 90 set roll_expo = 10 set pitch_expo = 10 set yaw_expo = 10 set roll_srate = 75 set pitch_srate = 75 set yaw_srate = 75
Mein Equipment:
Fatshark Dominator HD3 – https://goo.gl/6Z9eU4
Eachine Pro58+Achilles – https://goo.gl/x4v74Z
FrSky TARANIS Q X7 Funke – https://goo.gl/NLlhjc
FrSky X9D Plus SE Funke – https://goo.gl/KlnCoS
iRangeX IRX4 Plus Multiprotokol Modul – https://goo.gl/uF6Co8
FrSky XM Empfänger – https://goo.gl/5InfW5
FrSky R-XSR Empfänger – https://goo.gl/4YM9LH
FrSky XSR Empfänger – https://goo.gl/00SGNz
Flysky FS-i6 – https://goo.gl/zUEYnB
Turnigy Evolution – https://goo.gl/tzphLP
Fli14 Plus Empfänger – https://goo.gl/cbWDKs
RunCam Split Mini – https://goo.gl/mjJWvd
RunCam Micro Swift 3 – https://goo.gl/YK9yFr
RunCam Micro Sparrow 2 Pro – https://goo.gl/A3LjgC
RunCam Micro Eagle – https://goo.gl/cqE7t6
Facebook – https://www.facebook.com/kopterheld/
Blog – https://kopterheld.wordpress.com/
Youtube – https://www.youtube.com/kopterheld
RCGroups – https://goo.gl/JYP87D

Hallo Kopterheld,
bin begeistert von deiner Seite .
habe mir den Tyro99 gekauft und würde gern die mitgelieferte Camera durch eine Runcam Swift 2 ersetzen. Kannst du mir sagen wie ich die anschließen muss.
Gruß
Thomas
LikeLike
Das ist ganz einfach. Die original Kamera hat ein Kabel mit 3 Adern 5V rot, GND schwarz und signal gelb. Der Stecker müsste sogar direkt auf die Runcam passen.
Im Video sieht man der Stecker – https://youtu.be/uDzXPS8A9qA?t=247
Ich würde sogar besser die Runcam Racer nehmen. Die ist kleiner und hat in der Lieferung so ein Adapter mit dem man die Kamera wie eine große anschliessen kann.
Runcam Racer – Banggood – https://goo.gl/9UN7sS
LikeLike
Hallo Kopterheld,
danke für die ausführliche Anleitung zum Bau des Tyro99.
Jedoch habe ich noch eine frage.
Die Anordnung der Motoren sind bei dir M2 – M3 = CW und M1 – M4 = CCW.
Wenn man sich jedoch z. B. die Bilder bei Banggood in den Bewertungen ansieht haben einige dieses andersherum gemacht.
Ich habe zu dem Thema Geggoogelt aber bin nicht richtig fündig geworden.
Bei YouTube gibt es Videos zur Montage der Propeller, da ist es auch verschieden, die einen ziehen in Drehrichtung fest und die anderen genau umgekehrt.
Gibt es da eine Regel oder Erklärung für oder machst du das einfach nach Erfahrung??
Vielen dank im Voraus.
MfG
Marek
LikeLike
Ziel ist es dass die Motoren zum Schluss sich in die richtige Richtung drehen. Wie Du dahin kommst spielt keine Rolle. Manche Leute legen einen Wert auf die Lage der Kabel damit diese schön aussehen, andere Leute möchten nicht zusätzlich die Drehrichtung unter Bl-Heli anpassen also halten sich an der Grund Regel wie unter Betaflight die Motoren angeordnet sind mit M1 bis M4. Also ist die bessere, einfachere Methode die Motoren so zu setzen M1 – M4 = CW und M2 – M3 = CCW
Diagonal liegender Motor hat immer die gleiche Drehrichtung. Der rechter hinterer Motor M1 dreht sich im Urzeigesinn zum Heck der Drohne.
Heuzutage verwendet man fast nur Motoren mit der Drehrichtung im Uhrzeigesinn, so sind dann alle 4 Motoren CW wie zB bei Holybro Kopis 2 findest Du 4 CW T-Motor . Trotzdem werden die Motoren wie oben beschrieben nach der Regel M1 – M4 = CW und M2 – M3 = CCW gedreht.
Ein Bild mit der Drehrichtung habe ich hier im Tyro99 Artikel hinzugefügt
LikeLike
Hallo,
danke für die Flotte Antwort.
Die Drehrichtung ist bei mir soweit klar.
Mein Problem bezieht sich eher auf die Gewinde der Schrauben die die Propeller fest halten.
Schraube fest in Drehrichtung der Propeller?
Oder gegen die Drehrichtung fest??
Vielen Danke
Mfg Marek
LikeLike
Das Gewinde der Motoren ist immer entgegengesetzt der Drehrichtung des Motors, Propeller. Beim Drehen des Motors und fest halten der Schraube soll sich diese fest drehen. Da aber jetzt nur noch Sicherungsmuttern mit einer Kunststoff Sicherung verwendet werden kann man problemlose 4x gleiche Motoren verwenden zB 4x CW Motoren.
LikeLike
Danke für die Antworten.
Mfg
Marek
LikeLike
Hallo Kopterheld,
erst einmal vielen Dank für das gute Buildvideo. Ich bin neu in der Copterszene und habe mir die Tyro99 gekauft. Vorher hatte ich mir, ohne mich zu informieren, eine FlySky TH9X gekauft, welche mit AFHDS 2A arbeitet.
Der Empfänger, der dabei war ist zu groß gewesen, weshalb ich einen Mini Empfänger 8/18 CH AFHDS 2A mit PPM Ibus und Sbus gekauft habe.
Gebunden bekommen habe ich alles, die Brücke am FC mit PPM und Ibus habe ich gebrückt, die Funke auf PPM/Ibus eingestellt.
Auch das Kabel vom Empfänger ist auf Ibus angelötet.
In Betaflight habe ich in der Konfiguration bei Empfänger einen seriellen Empfänger und Ibus eingestellt.
Ich kann zwar im Betaflight bei Empfänger sehen, was ich mit der Funke gerade tue- aber wenn ich das Kabel abstecke und es so (Lipo ist angesteckt) probiere, dann reagiert der Tyro leider gar nicht. Was mache ich falsch? Die rote LED am FC blinkt dauerhaft, nur wenn ich am Empfänger den Gashebel kurz hoch ziehe, dann blinkt sie zweimal schnell hintereinander.
Ich komme leider einfach nicht weiter.
Danke schon mal!
Gruß Christoph
LikeLike
Prüfe unter RECEIVER Tab ob der minimaler Gas Wert unter 1050 ist. Oder setze den Stick low Wert höher als dein Gas Wert. Standard ist 1050. Wenn Gas höher ist als der „Stick Low Wert“ dann gehen die Motoren nicht an.
LikeLike
Hallo Kopterheld,
Erstmal Danke für die schnelle Antwort!
Der Gaswert war tatsächlich höher als der Stick Low Wert. Ich habe den Gaswert über die Fernsteuerung niedriger gesetzt, trotzdem habe ich noch das gleiche Problem wie vorher. Was kann ich noch probieren?
Danke schon mal, Gruß Christoph
LikeLike
Hi Kopterheld,
Habe es hinbekommen. Das Problem war, dass die Motoren immer gearmt waren.
Habe dann einen Schalter der Funke für das Arming belegt, dann hat es funktioniert.
Trotzdem danke für den Tipp mit dem Gashebel, das hatte ja auch nicht gestimmt bei mir.
Gruß Christoph
LikeLike
Hi Kopterheld,
ich möchte meine Firmenware updaten aber bei mir funktioniert es nicht.
Ich bringe den FC in Bootposition, danach passiert nichts mehr. Es heist, kein Zugriff auf das Bootmenue, glaube ich.
Was mache ich Falsch.?
Würde mich sehr freuen eine Antwort zu bekommen.
Gruß Hans
LikeLike
akku einstecken und noch einmal versuchen. bleibt es beim DFU stehen, dann kurz den USB raus und wieder rein und nochmal auf FLASH drücken.
LikeLike
Hallo Kopterheld,
kommst du mit BLHeli auf den ESC drauf?
Ich kann zwar connecten, er findet sogar, dass es 4 Motoren sind aber
er erkennt nicht die Firmware und somit lässt sich auch nichts einstellen.
Kennst du die Lösung?
Und weißt du zufällig welcher UART der S-Port ist?
LikeLike
Wird die Brücke beim tyro79 für dsmx gleich gelötet wie beim tyro99.
LikeLike
Every weekend i used to pay a visit this website,
for the reason that i wish for enjoyment, for the reason that this this web page conations genuinely
pleasant funny information too.
LikeLike